2023年ふりかえり
2023年についてふりかえってみたいと思います。ちなみに、去年は 2022年ふりかえり - n3104のブログ でした。
仕事
前半と後半で違うことをやっていましたが非常に充実感のある1年だったと思います。
システム開発
去年の9月から参加した受託開発の案件を5月末までやっていました。色々と大変なこともありましたが最終的にはお客様も含めてワンチームになって進めることができた案件でした。スクラム開発のやり方についても学べましたし、お客様のセキュリティ標準に適合させつつなるべく手作業をなくして自動化する形でAWSインフラの設計を一通り行ったのも良い経験になりました。ほんとお客様とチームメンバーに恵まれた案件だったと思います。
コーチングとファシリテーション
6月からは内製化支援チームの案件に戻って内製化支援コーチとして提案や毎回のセッションのファシリテーターを担当していました。提案のみや社内向けにドッグフーディングしてもらった案件も含めると10件近くの案件半年の間にやれたのでかなり忙しかったですが一気に経験値を増やせたと思います。こういうお客さんであればこういう支援ができるし、3ヶ月、6ヶ月でどういう変化が起きるかある程度予想できる感じになりました。
案件とは別に社内向けコーチ業も継続してコーチングの経験を積みました。おかげである程度はコーチングやファシリテーションの世界観がわかるようになり、実践もできるようになったと思いますが、まだまだ修行が足りてないなーと思ってます。
AWS認定取得
同僚の1/6ぐらいはAWS認定をコンプリートしているのでどこかのタイミングで一度コンプリートしようと思っていたのですが、6月から内製化支援チームの案件でIT技術に触れる機会も減ると思ったので並行して認定取得を続けて12月に コンプリート しました。特にネットワーク周りは詳しくなかったので Advanced Networking - Specialty 取得のために勉強してある程度理解できるようになってよかったと思っています。
英語
今年も1日1時間の英語学習を継続しました。ただ、あまり変化もなくなってきたのでこちらにまとめて書いておきます。
- 1年で英会話の能力は多少上がった気がする。レアジョブのDaily News Articleも初見で7割ぐらいは理解できるし、サマリーもとりあえず言えるし、ディスカッションでも言いたいことがある程度言えるようになった。ただし、レアジョブのスピーキングテストだと変化はなかった。
- iKnow! はついに10000マスターアイテムを達成した!そして復習アイテムが多すぎて新規コースを追加できなくなった。例文のシャドーイングを続けていて、この1年で聞き取れる範囲が少し増えた気がする。
- ディクテーションの勉強を始めた。毎日5分なのであまり成長しなかったが、自分がよく聞き間違える部分はある程度把握できたし、英語を書き取るという行為にも多少慣れた気がする。
- 英作文と言うか言いたいことを話す練習という意味でレアジョブのConversation Questionsも継続した。毎日5分教材の質問に対する回答の作文を継続した。
- リーディングという意味ではハリーポッターをついに読み終えた!呪いの子まで読んだが約2年かかったので感慨深かった。その後は英会話で説明に困ることが結構あるので4冊ぐらい英語で書かれた日本の観光案内の本を読んだ。知らない観光名所もあったりおもしろかったが、英会話で役に立っている印象はないような。その後はThe Lord of the Ringsを読み始めた。
読書
今年もそこそこ読んだのですが、読書メモを書く時間が取れなくてほとんど読書メモを書けなかったです。。
- ゾンビスクラムサバイバルガイド - n3104のブログ
- 外資系コンサルが教えるプロジェクトマネジメント - n3104のブログ
- コーチングの神様が教える「できる人」の法則 - n3104のブログ
- グループ・コーチング入門 - n3104のブログ
- 要点整理から攻略する『AWS認定 高度なネットワーキング-専門知識』 (Compass Booksシリーズ)
- みんなのデータ構造
- 大学新入生のための数学入門 増補版
- インターネットルーティング入門 第3版
- 人と組織の進化を加速させる システム・インスパイアード・リーダーシップ Systems Inspired Leadership
- ファシリテーションの教科書―組織を活性化させるコミュニケーションとリーダーシップ
- 超ファシリテーション力
- 対話型ファシリテーションの手ほどき
- キーエンス解剖 最強企業のメカニズム
- U理論[第二版]――過去や偏見にとらわれず、本当に必要な「変化」を生み出す技術
- 日本語教育のスタートライン 本気で日本語教師を目指す人のための入門書
- インフラ/ネットワークエンジニアのためのネットワーク技術&設計入門 第2版
- インフラ/ネットワークエンジニアのためのネットワーク・デザインパターン 実務で使えるネットワーク構成の最適解27
- 部下が自ら成長し、チームが回り出す1on1戦術――100社に導入してわかったマネジャーのための「対話の技術」
- コーチングよりも大切な カウンセリングの技術 (日本経済新聞出版)
- Harry Potter and the Half-Blood Prince (English Edition)
- Harry Potter and the Deathly Hallows (English Edition)
- Harry Potter and the Cursed Child - Parts One and Two: The Official Playscript of the Original West End Production (English Edition)
- Japan Travel Guide: The Most Comprehensive and Updated Pocket Guide to The Mesmerizing Japan! Embark on a Dream Journey with The Insights of a 30-Year-Old Expert (English Edition)
- Japan: The Ultimate Japan Travel Guide By A Traveler For A Traveler: The Best Travel Tips; Where To Go, What To See And Much More (Japan Travel Guide, ... History, Kyoto Guide,) (English Edition)
- Japan in 60 Easy Steps: The compact and comprehensive travel guide with expert tips (Japan Travel Guide Book 2) (English Edition)
- Tokyo Maze – 42 Walks in and around the Japanese Capital: A Guide with 108 Photos, 48 Maps, 300 Weblinks and 100 Tips
読書会
みんなのデータ構造 を読み終わりました。今年は10回やり、合計で16回でした。ディスカッションと練習問題は飛ばしましたが、本文の数式部分の説明についても取り組むようにしてある程度は理解できたと思います。
主催している読書会も今年で12年目になりましたが、書籍毎に多少のメンバーの入れ替わりもありながら月次開催を続けられていています。いつも参加してくれるメンバーには感謝しかありません。ゆるく続けていきたいと思っています。
データ構造とアルゴリズム
6月から社内でLeetCodeの問題を毎週解く会に復帰してしてました。また、読書会でみんなのデータ構造も読んだりもしていましたが、もう少し本格的に取り組む必要を感じたので8月から 問題解決力を鍛える!アルゴリズムとデータ構造 (KS情報科学専門書) を毎日10分読むようになりました。半分ぐらいまで読んだので、残りも読んだら次は毎日LeetCodeもしくはAtCoderの過去問を毎日解こうかなと思ってます。
数学
数学は毎回確認しては忘れてを繰り返しているので毎日少しでも触れる時間を持った方がよいと考えて1月から毎日5分、大学新入生のための数学入門 増補版 をやりました。毎日5分なので1年かけて1冊終わった感じです。1日5分でも学習できるし、毎日触れている方が忘れにくい実感があったので今後も 石村 園子さんのやさしく学べるシリーズ をやるつもりです。
絵を描く
数学と同じ感じで以前から絵を描けるようになりたかったので毎日5分〜10分絵を描く時間を持つようになりました。最初はDAISOに売っている 3歳〜6歳向けの本 から始めて、鉛筆一本ではじめる光と陰の描き方 ロジカルデッサンの技法 をやり、今は 3ステップで らしく描ける 伝わる絵の見本帖 ロジカルデッサンの技法 のイラストを1日1個模写してます。上達している実感は特にありませんが、単純に楽しいですし、美術展などで絵を見る際も以前よりも気になる点が増えてたりします。
まとめ
ふりかえってみると、ありがたいことに2023年も密度の高い1年だったと思います。2024年も新しいことを経験できるといいなと思ってます。
グループ・コーチング入門

サービス開発の参考になりそうなので読みました。1名ではなく複数名を対象としたコーチング手法について説明しています。管理職が部下に対して適用することを前提として書かれているので、管理職もしくはチームサブリーダー的な人におすすめの本だと思いました。
本書の構成としてはまず「一人対一人」のコーチングとグループコーチングの違いについて説明します。具体的にはグループコーチングは「一人対複数」で行うコーチングです。より厳密には「企業の管理職が、自分の担当する部門の業績を上げるために、原則的には一人の部下に対して複数の部下の前でコーチングをすること」になります。次にグループコーチングの具体的な進め方について説明します。テーマの設定やメンバーの選定、どのようにグループコーチングのミーティングを開くか、どのような質問をするか、進行中の打ち合わせの状況ごとにどう対応するかなど具体的に説明します。次に傾聴・観察・承認というコーチングの基本スキルをグループコーチングにおいてどのように発揮すればよいか説明します。その次は質問についてグループコーチングでは複数名参加者がいるためどのように質問をすればよいか説明します。最後にケーススタディを3つ紹介します。それぞれ各参加者のやりとりまで書かれており具体的です。最後はQ&Aとチェックシートになっています。具体的な目次は以下のとおりです。
- [Ⅰ] グループ・コーチングの基本
- [Ⅱ] グループ・コーチングの具体的な進め方
- [Ⅲ] 傾聴・観察・承認のスキル
- [Ⅳ] 質問のスキル
- [Ⅴ] ケーススタディ
- グループ・コーチングQ&A
- グループ・コーチングの実勢チェックシート
自分たちが提供しようとしているサービスと具体的なアプローチが異なるので、そのままは使えませんでしたが、同じように複数名を対象としてコーチングの手法を適用しようとしているという点で参考になりました。また出版された時期が2007年であり若干昔であることと、日経文庫から出版されていることもあって一般的なパーソナルコーチングの書籍と比べると管理職側の意図や設計が重視されている印象を持ちました。一方で、いわゆるマネージャーというロールにおいて複数名のメンバーに対してコーチング的手法を適用するという観点で見ると、かなり実務に沿った具体的な手法と進め方について説明されていたと思います。ですのでマネージャー職の人はコーチングについて学ぶ際にこの本も読んでおくと良いと思いました。
コーチングの神様が教える「できる人」の法則

15年近く前に読んで、また読み直したくなったので買い直しました。改めて読んでいい本だと思いました。エグゼクティブ・コーチを専門としていたマーシャル・ゴールドスミスがエグゼクティブ向けにどのようなコーチングをしていたかが書かれています。邦訳のタイトルがアレですがオリジナルは「What Got You Here Won't Get You There: How successful people become even more successful」です。要は今までの強みがさらなる成功に繋がらないというタイトルであり、実際にそういう内容です。書いてあることは一般的に言われるような内容ばかりですが、なぜそれが問題であり、どうやって克服すればいいかについて明瞭に書かれています。また説明する際も筆者のクライアントの事例をベースとしているため読みやすいです。自分の中に直したいと思っている箇所がある人は読んでみるとよいと思います。
本書の構成としては4つのセクションに分かれています。セクションⅠは成功することでいままでのやり方に固執することになり自分の問題点について直すことできなくなる理由について説明します。次にセクションⅡでやめるべき21の悪い癖について説明します。セクションⅢでは悪い癖を解消する手法について紹介します。最後のセクションⅣで自分を変える際の注意点について説明します。目次は以下のとおりです。
- セクションⅠ 成功で厄介なこと
- 1 エグゼクティブ・コーチとは何か
- 2 成功したほど、変化を嫌う理由
- セクションⅡ あなたをトップの座から遠ざける20の悪癖
- 3「やめること」の大切さ
- 4 20の悪い癖
- 5 21番目の癖ー目標に執着しすぎる
- セクションⅢ どうすればもっとよくなれるのか
- 6 フィードバック
- 7 謝罪する
- 8 公表する。宣言する
- 9 聞くこと
- 10 「ありがとう」と言う
- 11 フォローアップ
- 12 フィードフォワードを練習する
- セクションⅣ 「自分を変える」ときの注意すべきポイント
- 13 「自分を変える」ときのルール
- 14 部下の扱い方
去年コーチングについて勉強していた際に、若い頃に読んだコーチング関連の本を何冊か思い出し、その中でも本書の内容がよかったので読み直したいと思って探していました。ただ、本のタイトルを忘れていたので探すのが結構大変でした。何より2007年の本なので廃刊になっており本屋で探しても置いてないし、電子版も存在しないので結局中古を買いました。
読み直せてすごく満足ですし、最低でも年に1回は読み直すつもりです。出世とかエグゼクティブとかに関係なく自分で課題だと思っている点の修正に使える本だと思います。読み直した際も自分の悪い癖について向き合うことになり、ほんとどうにかしないとなという気持ちになりました。定期的に読み返して対処していければと考えています。
Mistel BAROCCO MD770 JPをMacで利用する際の設定手順

前々から分離型キーボードが気になっていて、Mistel BAROCCO MD770 JP(日本語配列) キーボード をつい勢いで買ってしまいました。まだ買ったばかりなのでどの程度肩こりに効果があるのかは不明です。Macで利用できるようにするまで試行錯誤したので、設定手順についてメモしておきます。
前提
- MacBook Pro (13-inch, M1, 2020) 日本語キーボード
- Monterey Version: 12.6.3
- Mistel BAROCCO MD770 JP (Ver.MD770JPALL 2107)
- Karabiner-Elements 14.11.0
設定手順
- BAROCCOの Fnキー のリマップ
- Karabiner-Elementsでキーのリマップ
1. BAROCCOの Fnキー のリマップ
BAROCCOは Fnキー をマクロプラグラミング等に利用する特殊なキーとしているため、初期状態だと 右Windowsキー(右Cmdキー)として利用できません。そのためは好みのキーに Fnキー をリマップします。私は 全角/半角キーキー にリマップしました。手順は マニュアル を参照してください。Fnキー のリマップにはレイヤーの指定が必須のため、まずレイヤー1〜3のどれかに変更しないければいけないのが注意点です。私はレイヤー1に変更してリマップしました。
※ その後、Pnキー + TABキー を偶然タイプしてmacOS 風最適化モードに切り替わり原因調査に苦労したので追加で Pnキー を Insキー にリマップしました。。
2. Karabiner-Elementsでキーのリマップ
Karabiner-Elements で以下のようにキーをリマップします。
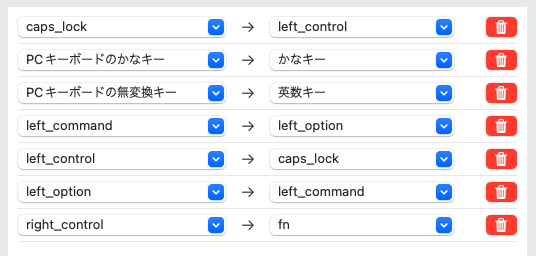
Karabiner-Elements をインストールしていない場合は Installation | Karabiner-Elements に沿ってインストールします。バイナリは brew install --cask karabiner-elements でもインストール可能です。私は brew コマンドを利用しました。
リマップ手順は MacでWindowsキーボードを使う!Karabinar-Elementsの設定法 - ビビーノ・ワイン が分かりやすかったです。
備考
macOS 風最適化モード
BAROCCOにはmacOS 風最適化モードが存在します。Karabiner-Elementsでリマップする内容とほぼ差がないのですが1点だけ F1 〜 F12キー が通常のファンクションキーではなく音量の制御等が行えるキーに割り当てられています。そのため通常のファンクションキーとして利用するには Fnキー を押しながら F1 〜 F12キー を操作する必要があります。Mac側の設定で外部接続するキーボードを標準ファンクションキーとする設定を有効にしてもこの挙動はかわりませんでした。。そのため今回の設定手順を探すことになりました(´・ω・`)
英字キーボードとして認識される?
トリガーが不明ですが急に英字キーボードとして認識されたのか記号が日本語キーボードの位置と異なるものが入力されるようになりました。ただ一度USBのケーブルを抜き挿しすると挙動が戻ったので調子が悪いときはケーブルを挿し直すとよいのかもしれません。
最後に
キーボードを肩幅に合わせて配置できるようになったので自然と姿勢も気をつけるようになりました。肩こりに効きそうで期待大です!
外資系コンサルが教えるプロジェクトマネジメント

社内で読書会があったので読んでみました。200ページ強ですぐ読めます。プロジェクトマネジメントの具体的なやり方というよりはプロジェクトマネジメントに取り組む上で意識するべき観点をまとめたような内容です。そのためどういう観点を意識するとよりスムーズにプロジェクトマネジメントができるか知りたい人におすすめの本だと思いました。
本書の構成としては4章に分かれています。第1章はプロジェクト開始前、第2章はプロジェクト序盤、第3章はプロジェクト中盤以降、第4章はリーダーシップについて説明しています。それぞれの章の中で筆者が経験から学んだ「すべし」と「すべからず」のポイントについて解説します。例えば1章の最初に説明するポイントは 「勝てるプロジェクト」を見極める です。目次は以下のとおりです。
- 第1章 プロジェクトマネジメントは始まる前にすべてが決まる
- 第2章 プロジェクト序盤に注意するべきこと
- 第3章 プロジェクトをうまく「着地」させる
- 第4章 計画を成功に導くリーダーシップ
全体的に読みやすいですが、説明をする際に他の書籍や文献などの引用する多様する印象があります。また、引用する際は特に補足はしないので、その内容を知らない場合に却って何をいいたいのかわかりづらい箇所がありました。あと、その箇所で説明する内容と直接関係しない筆者の主張がたまに述べられていて、話がそれるのでわかりづらくなる箇所がありました。
筆者の主張の大半は同意するものですし、半分ぐらいは自分でもやっていたことでした。そのため、自分のアプローチと同じ考え方の人がいることをしれて安心しました。またやっていなかった内容のうち一部は試してみたいと思えるものもあったので参考になりました。機会があれば試してみるつもりです。
ゾンビスクラムサバイバルガイド

スクラムについてもう少し書籍を読んでみようと思って読みました。スクラムを実践するなかで陥る問題とその対処方法について説明しています。チームで意見を出す方法が多数紹介されているので、実際にスクラムでプロジェクトをやっている人だけでなくチームで意見を出すファシリテーション手法を学びたい人にも参考になると思いました。
本書の構成はとしてはまずは1部でゾンビスクラムとその具体的な症状について説明します。次に2部〜5部で主要な症状毎に原因と解消に向けて試せる各種手法(実験)を紹介します。目次は以下のとおりです。詳細な目次は ゾンビスクラムサバイバルガイド - 丸善出版 理工・医学・人文社会科学の専門書出版社 を参照してください。
- 第1章 はじめに
- 第2章 応急処置キット
- 第1部 (ゾンビ)スクラム
- 第2部 ステークホルダーが求めるものを作る
- 第5章 症状と原因
- 第6章 実験
- 第3部 速く出荷する
- 第7章 症状と原因
- 第8章 実験
- 第4部 継続的に改善する
- 第9章 症状と原因
- 第10章 実験
- 第5部 自己組織化する
- 第11章 症状と原因
- 第12章 実験
- 第13章 回復への道
非常に実践的な実験が多く紹介されていて参考になりました。スクラムに関係なくチームでアイディアを出したり合意形成を得る際に利用できそうな印象でした。後は自分たちでできることを探すというコンセプトだからだと思うのですが、基本的にボトムアップな手法が紹介されている印象でした。スクラムらしいと言えばスクラムらしいのかもしれませんが。
これまでに何冊かスクラム関連の書籍を読み、実際に案件でもスクラムを適用していて思うのは、ビジネス自体の構造がスクラムのコンセプトにあっていない場合、開発だけスクラムにしてもうまく回らないだろうなという点です。本書はそのような制約があっても少しずつ現場から変えられるところを探すというコンセプトなので、それはそれで大切なことだと思いました。一方で、スクラムはあくまでも手法なのでビジネスの構造や状況に合わせて手法も柔軟に対応するほうが合理的なのかなと思いました。
2022年ふりかえり
2022年についてふりかえってみたいと思います。ちなみに、去年は 2021年振り返り - n3104のブログ でした。
仕事
改めて期待値調整大切だなーと思う1年でした。後は大小含めて7プロジェクトほど関わりましたが、それぞれ初めて試す部分があり、学びがあってよかったです。
コーチング
たぶん今年一番伸びたのがコーチングのスキルだと思ってます。現在社内コーチとして3名の方にコーチングを提供しています。もともと内製化支援サービスでコーチングをメインとしている同僚がいたこともあり、今年はコーチングの本を5冊ほど読んである程度イメージは理解したつもりでいたのですが、やはり実践してみるとぜんぜん理解できていなかったことがわかりました。
具体的な進め方はGROWモデルをベースに質問をしながらアクションに繋がるように後押ししているだけですが、クライアントによって相談内容もセッションの雰囲気もぜんぜん違うのですごく勉強になります。何より自分の意見を言わずに質問をし続けるだけなので、想像もつかない話が聞けてともて面白いです。
あとやってみて分かったのはマネージャーがコーチング的な手法を利用するのと純粋なコーチングは別物ということです。私は社内コーチとして直接利害関係がない社内の同僚に対してコーチングを提供しているので純粋なコーチングをやれています。ですが、もし自分がマネージャーであった際にチームのメンバーに対してコーチング的手法を適用しようとしたら、かなり難しいだろうなと予想しています。もちろん、1on1の際などに今日は純粋なコーチングをやろうとメンバーに対して説明し、同意を得た上でやるならできるかもしれませんが。。なので、その違いを理解できたこともよかったですし、純粋なコーチングを実践する機会を得られたことも幸運だと思っています。
スクラム
9月から受託開発案件に参加したのですが、そちらではスクラムを採用していました。そのため並行してスクラム関連の書籍も3冊ほど読み、おかげてスクラムのやり方や思想、採用する際の前提条件や実施する上での留意事項などもある程度把握できました。スクラムも名前は聞いたことがあったのですが実際にやったことがなかったので経験を得られて幸運だと思っています。
内製化支援
実際に複数の案件をやる中で顧客の期待値や自社として提供できそうな価値についてある程度整理できたと思います。サービス立ち上げ初期なこともあり、色々試した1年だったと思いますし、顧客の解像度もかなり上がったと思います。思い返すとほんといろんなことをやった気がします。。今までのキャリアの延長では経験できないことを色々経験できたのは期待していたことだったのでよかったと思っています。
あと同じチームのメンバーがコーチングやスクラムに詳しいので、疑問に思ったことはいつでも確認できるのもよかったです。いやー、ほんとラッキだなーと思ってますw
英語
今年も1日1時間の英語学習を継続しました。詳細は 2022年英語学習ふりかえり - n3104のブログ に書いてあります。現状、英語を仕事で使う機会がないので、趣味に振り切ってもいいかなと考えてたりします。
読書
今年もそこそこ読んだのですが、何冊かは読書メモを書けなかったです。なので8月くらいからは読書メモを書くまでは次の本を読まないルールに変えました。
- データ指向アプリケーションデザイン ―信頼性、拡張性、保守性の高い分散システム設計の原理
- English Grammar in Use Book with Answers and Interactive eBook: Self-Study Reference and Practice Book for Intermediate Learners of English
- Goならわかるシステムプログラミング - n3104のブログ
- FACTFULNESS(ファクトフルネス)10の思い込みを乗り越え、データを基に世界を正しく見る習慣
- Clean Architecture 達人に学ぶソフトウェアの構造と設計 - n3104のブログ
- エリック・エヴァンスのドメイン駆動設計
- モダンエルダー 40代以上が「職場の賢者」を目指すこれからの働き方 - n3104のブログ
- 図解ポケット コーチングの基本とツボがよくわかる本 - n3104のブログ
- 新 コーチングが人を活かす - n3104のブログ
- DXを成功に導くクラウド活用推進ガイド CCoEベストプラクティス - n3104のブログ
- この1冊ですべてわかる 新版 コーチングの基本
- ディープラーニング 学習する機械 ヤン・ルカン、人工知能を語る (KS科学一般書)
- 雰囲気でOAuth2.0を使っているエンジニアがOAuth2.0を整理して、手を動かしながら学べる本 - n3104のブログ
- OAuth、OAuth認証、OpenID Connectの違いを整理して理解できる本 - n3104のブログ
- OAuth・OIDCへの攻撃と対策を整理して理解できる本(リダイレクトへの攻撃編 - n3104のブログ
- コーチング・バイブル(第4版)―人の潜在力を引き出す協働的コミュニケーション
- アイデアをカタチにする!M5Stack入門&実践ガイド[M5Stack Basic/M5StickC対応]
- システム内製化の極意 事例で学ぶDX推進の切り札(日経BPムック)
- 3分間コーチ ひとりでも部下のいる人のための世界一シンプルなマネジメント術
- Evidence-Based Management Guide - n3104のブログ
- チームトポロジー - n3104のブログ
- Amazon Redshift re-invented - Amazon Science
- マスタリングTCP/IP 入門編(第6版) - n3104のブログ
- Measure What Matters 伝説のベンチャー投資家がGoogleに教えた成功手法 OKR - n3104のブログ
- 英会話は筋トレ。 中2レベルの100例文だけ! 1か月で英語がスラスラしゃべれる。
- SCRUM BOOT CAMP THE BOOK - n3104のブログ
- SCRUMMASTER THE BOOK - n3104のブログ
読書会
データ指向アプリケーションデザイン ―信頼性、拡張性、保守性の高い分散システム設計の原理 をやっと読み終わりました。今年も6回開催し、合計で28回かかりました。2年以上同じ本を読みましたが、ほんといい本だったのでよかったと思っています。読書会のメモのボリュームが凄くて結局読書メモとして公開できていないのですが、どこかで公開できるといいなと思ってます。
次は みんなのデータ構造 を読んでいます。6回やって5章まで進みました。データ構造はわかるのですが、理論面の解説が難しいのでまずはデータ構造だけ読んで、最後に時間のある範囲で理論面を読むやり方で進めています。やはり基礎がないと数式の展開は理解できない部分があるので、どこかで数学の勉強をがっつりやりたい気持ちになります。。
主催している読書会も今年で11年目になりましたが、書籍毎に多少のメンバーの入れ替わりもありながら月次開催を続けられていています。いつも参加してくれるメンバーには感謝しかありません。ゆるく続けていきたいと思っています。
データ構造とアルゴリズム
今年はAtCoderはやらなくなってしまい、社内でLeetCodeの問題を一緒に解くのを毎週楽しみにしている感じでした。ただ、案件が忙しくなりすぎて11月からはLeetCodeの会にも参加できなくなっているのが残念です。。案件が落ち着いたらLeetCodeは再開したいと思っています。AtCoderの方はLeetCodeが落ち着いたらコンテストに関係なくやれるといいかなと考えています。
その他
今年もプライムビデオでアニメを観てました。ただ、去年よりも観る時間も減っていて、よかったのは異世界おじさんとオーバーロードの4期でしょうか。FGOもゆるく続けていて、モルガンを5枚揃えてレベル120にしたのは頑張ったかなという感じです。後はマンガアプリで漫画を読みまくっていて、左利きのエレンが特によかったと思います。
まとめ
ふりかえってみると、ありがたいことに2022年も密度の高い1年だったと思います。去年転職する際に期待した通り、今までのキャリアの延長では経験できないことを色々経験できたと思います。常にどうしたらいいんだろうと頭を抱える事態ばかりでしたが、概ねなんとかなったかなと。来年も新しいことを経験できるといいなと思ってます。